澳大利亚莫纳什大学研发AR人机协作施工系统
澳大利亚莫纳什大学的研究试验了一套新系统,证明人类与机器人如何协同工作,使施工更快、更安全、更省力。在人类与机器人合作研究的基础之上,团队正在测试增强现实技术,以展示人类与机器如何无缝协作。
其中,参与者佩戴AR头显,就像“智能”一样,通过这种方式来向机器人展示存储区和工作区之间的最佳路线,并预览机器人的运动记录。这有助于工人与机器人协调,减少错误,加快任务速度,并在现场保持更安全。
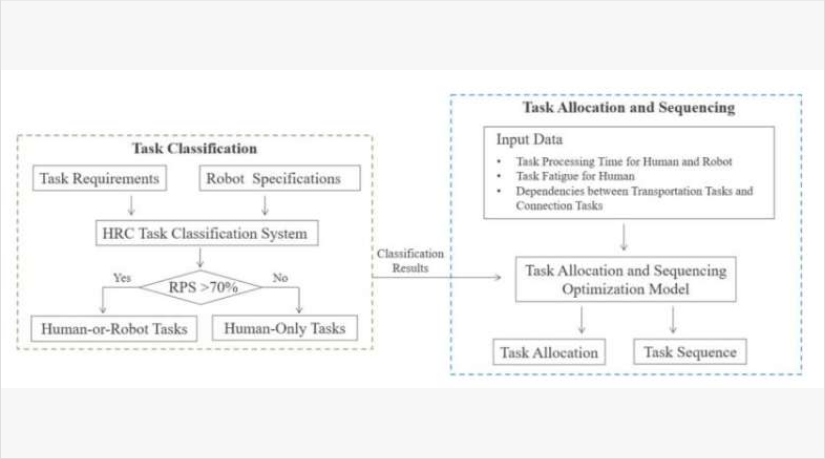
据介绍,研究人员开发了一套智能规划系统,它不仅应由机器人处理哪些任务,哪些应由人类工人完成,而且将人体疲劳度纳入规划过程。研究人员模拟了人类和机器人为一组确定了工作木地板框架,并将这二者划分为71项任务。然后,利用莫纳什大学UR10e机械臂和MiR100机器人移动的真实数据,测量了完成任务时间、生产效率和身体疲劳度。
这项技术解决了建筑机器人技术中的一个关键挑战:确定哪些任务应该由人类完成,哪些任务应该由机器人完成。
研究结果表明,仔细的任务和排序工作可以提高施工效率,同时减弱对人类工人的体力要求。研究人员表示:“在建筑领域与机器人合作不再是一个遥远的愿景,它正在迅速成为现实。面对生产力低下、劳动力短缺和高工伤率等持续挑战,行业必须通过整合自动化和先进的机器人技术来拥抱创新。”
团队补充道:“模拟结果真正展示了机器人如何减轻工人的压力——它们可以处理繁重的搬运和重复性工作,而人类的注意力则集中在规划、解决问题和确保一切完美契合。到场外预制和智能现场协作真正如何使建筑对工人来说更安全、更快速,真是令人兴奋。”
特别是,XR技术在机器人领域的应用前景十分光明,比如英伟达和特斯拉等厂商都在探索利用XR头显来辅助训练机器人。值得一提的是,PICO团队早前发布了XR机器人远程操作框架XRoboToolkit。其具有沉浸式低延迟体验,相比部分现有方案大幅降低了晕眩感,提升机器人遥操用户,另外,通过体验优化型QP逆运动学模拟器,机械手臂可以复杂在工况下的平稳控制,而灵巧手重定向算法可将XR重新数据映射到机器人手上,实现重新中断与操作。



